您现在的位置是:【微信950216】迪威上下分客服 > 焦点
国际最新研发出一款巧手机器人 可超范围抓取物体多目标处理任务
【微信950216】迪威上下分客服2026-01-22 14:57:25【焦点】4人已围观
简介中新网北京1月21日电 (记者 孙自法)施普林格·自然旗下学术期刊《自然-通讯》最新发表一篇机器人学论文称,研究人员研发出一个能爬行和抓握物体的可拆卸机械手(即巧手机器人),其设计能抓取超出正常范围的
中新网北京1月21日电 (记者 孙自法)施普林格·自然旗下学术期刊《自然-通讯》最新发表一篇机器人学论文称,国际研究人员研发出一个能爬行和抓握物体的最新可拆卸机械手(即巧手机器人),其设计能抓取超出正常范围的出款超范处理物体并完成多目标对象的处理任务,有望应用于工业、巧手取物服务业和勘探业的机器机器人。
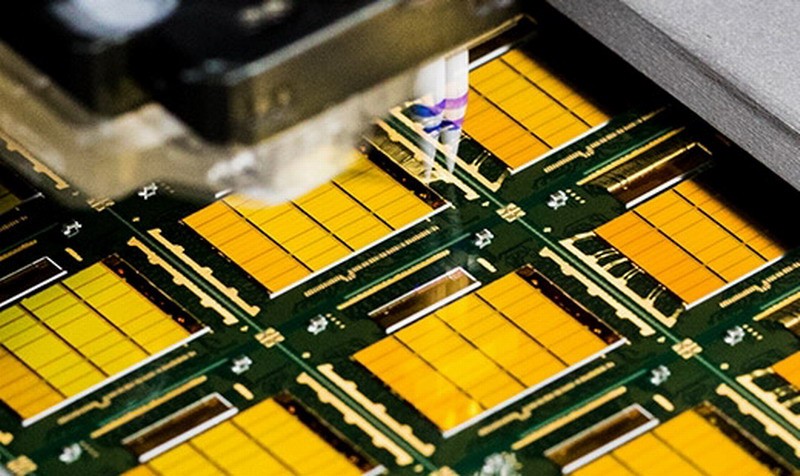
本项研究的人可任务机械手可从机械臂上分离,爬行拾取多个物体,围抓并重新连接(图片来自研究团队)。体多施普林格·自然 供图该论文介绍,目标机械手的国际设计通常模仿高度灵巧的人类手部。然而,最新人类手仅能从单面抓握的出款超范处理非对称结构以及有限的抓取范围,限制了其执行特定任务的巧手取物能力,例如同时抓取多个物体或是机器进入狭窄空间。
基于此,人可任务瑞士洛桑联邦理工学院研究团队与美国麻省理工学院同行合作,展示了研发出的两种版本机械手:五指设计和六指设计(手掌直径16厘米),两种版本均为对称结构,可实现双面抓握。此外,这种机械手还能从机械臂基座脱离并爬行。
本项研究成果相关示意图(图片来自论文)。施普林格·自然 供图研究人员进行演示表明,该机械手可连续抓取最多3个物体,并在安全抓握物体的同时重新连接机械臂。同时,该机械手可安全抓握多种类型的日常物体,包括卷筒芯、橡胶球、白板笔和罐头等;它还能模仿33种人类抓握形式,并握住重达2千克的物体。
论文作者表示,在最新发表成果基础上,未来研究可探索这类技术的潜在应用,包括进入狭窄空间并开展任务等。(完)
很赞哦!(473)
热门文章
站长推荐







友情链接
- 申京22+15+5火箭送快船3连败 杜兰特16分小卡24+9致命失误
- 弹壳特攻队10月最新兑换码 弹壳特攻队10月
- 性生活后能喝冷饮吗?
- 在职研究生报名流程
- 大青叶有几种,大青叶有几种叫法
- 远去的风,错付的情
- 人工智能助力垃圾分类,解决难题的创新方案
- 给癌症患者送什么水果好
- 新初三作文训练规划及亮点设置
- 人工智能助力垃圾分类,解决难题的创新方案
- 成功名言:描写成功的名言(六)
- 京东旅行开启春节大促:机票0捆绑,退改透明
- Bác thông tin NOXH ngay trung tâm TP.HCM giá chỉ hơn 20 triệu đồng/m2
- 日本学生利用Grok“脱衣”同班女生 现担心面临刑事责任
- 《绯红编年史》PC版下载 Steam正版分流下载
- 成功名言:描写成功的名言(五)
- 万代:《皇牌空战7:未知空域》全球销量突破700万份
- 再创历史!中国U23男足首次晋级亚洲杯决赛
- 2026LPGA蓝湾大师赛正式官宣 总奖金升至260万美元
- 炎夏来道清爽下饭菜 香菜酱拌牛肉